สวัสดี! ในบทความนี้ เราจะพูดถึงไดรเวอร์ TB6600 จาก HANPOSE หากคุณเพิ่งเริ่มต้นใช้งานไดรเวอร์นี้ คุณมาถูกที่แล้ว! เราจะพาคุณไปทุกสิ่งที่คุณจำเป็นต้องรู้เพื่อเริ่มต้นใช้งาน การตั้งค่าอย่างถูกต้อง และการแก้ไขปัญหาที่คุณอาจพบเจอระหว่างทาง
ตัวขับ TB6600 เป็นองค์ประกอบสำคัญสำหรับการควบคุมมอเตอร์แบบก้าวหน้า มันควบคุมปริมาณพลังงานและแรงดันที่มอเตอร์จะได้รับ เพื่อให้เคลื่อนไหวได้อย่างแม่นยำและลื่นไหล ก่อนที่คุณจะใช้งานตัวขับ TB6600 กรุณาอ่านคำแนะนำอย่างละเอียด ซึ่งจะให้ข้อมูลที่เป็นประโยชน์เกี่ยวกับวิธีการต่อตัวขับเข้ากับมอเตอร์แบบก้าวหน้าของคุณและประเด็นอื่น ๆ
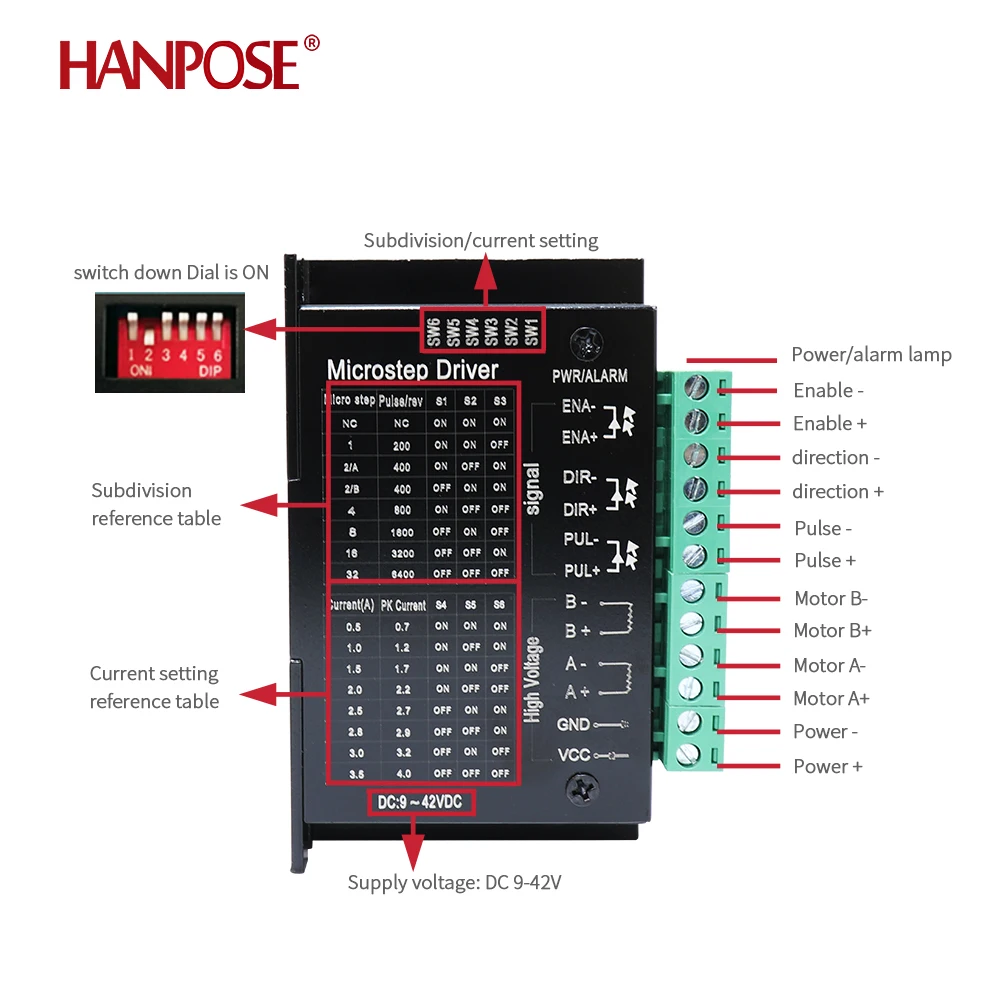
การติดตั้งไดรเวอร์ TB6600 ถือเป็นขั้นตอนสำคัญในการเริ่มต้นใช้งานมอเตอร์สเต็ปเปอร์ของคุณ! เริ่มต้นด้วยการต่อสายไฟจากไดรเวอร์ไปยังมอเตอร์ แหล่งจ่ายไฟ และตัวควบคุม ตามแผนผังการเดินสายไฟที่กำหนดไว้ เมื่อเชื่อมต่อทั้งหมดเสร็จสิ้น คุณจะต้องปรับตั้งค่าไดรเวอร์ให้เหมาะสมกับสเปคของมอเตอร์ของคุณ ซึ่งรวมถึงการปรับตั้งสวิตช์แบบ DIP และตัวปรับแปร (trim pots) เพื่อตั้งค่าต่าง ๆ เช่น กระแสไฟฟ้า (current) การแบ่งสเต็ปย่อย (microstepping) และอื่น ๆ โปรดทราบว่า คุณจำเป็นต้องทำตามขั้นตอนการปรับเทียบอย่างถูกต้อง เพื่อป้องกันการเกิดความเสียหายกับมอเตอร์และไดรเวอร์ของคุณ

ข้อผิดพลาดที่พบบ่อย (บางครั้งมอเตอร์ไม่สามารถรักษาตำแหน่งของไมโครสเต็ปไว้ได้): ให้คุณตรวจสอบคู่มือการแก้ไขปัญหานี้ ความถี่ 25kHz ถือว่าผิดปกติ แต่ไดรเวอร์สามารถรองรับได้แม้ว่าจะทำงานได้

ในบางครั้งคุณอาจไม่สามารถบรรลุผลลัพธ์ที่คาดหวังเมื่อเชื่อมต่อไดรเวอร์ TB6600 ก็เป็นได้ หากคุณมีปัญหาใด ๆ เช่น มอเตอร์ติดขัด เกิดความร้อน หรือเคลื่อนไหวควบคุมไม่ได้ อย่ากังวล! ยังมีปัญหาบางอย่างที่คุณสามารถแก้ไขได้ด้วยตนเอง ตรวจสอบการเชื่อมต่อและสายไฟทั้งหมด ตรวจสอบให้แน่ใจว่าไดรเวอร์ได้รับแรงดันไฟฟ้าและกระแสไฟฟ้าที่เหมาะสมจากแหล่งจ่ายไฟ หากมอเตอร์ยังคงทำงานผิดปกติ คุณอาจต้องเปลี่ยนการตั้งค่าของไดรเวอร์หรืออุปกรณ์ที่มีปัญหา
ตรวจสอบให้แน่ใจว่าการเชื่อมต่อทั้งหมดเสร็จสมบูรณ์ก่อนเสียบปลั๊กไดรเวอร์ (เพื่อหลีกเลี่ยงการลัดวงจร ห้ามใช้งานจนกว่าจะเปิดใช้งานไดรเวอร์)
ยินดีต้อนรับสู่ HANPOSE โรงงานผลิตมอเตอร์สเต็ปปิ้งในประเทศจีน! เราให้บริการรุ่นมอเตอร์ที่ครอบคลุม การพัฒนาเทคโนโลยีใหม่ และการใช้งานมอเตอร์ที่หลากหลาย
ลิขสิทธิ์ © Guangzhou HANPOSE 3D Technology Co., Ltd. สงวนสิทธิ์ทั้งหมด นโยบายความเป็นส่วนตัว บล็อก